Can шина принцип работы
Что такое CAN-шина
CAN-шина не имеет никакого отношения к автомобильным покрышкам. Дело в том, что в электронике «шиной» называют систему, по которой передаются данные. Это своего рода река с ручейками, если говорить проще. Что касается аббревиатуры, расшифровывающейся как Controller Area Network (сеть контроллеров), то за ней стоит стандарт промышленной сети для объединения в единую сеть различных исполнительных устройств и датчиков.
Принцип работы CAN-шины
CAN-шина, будучи системой цифровой связи и управления электронными устройствами, позволяет осуществлять обмен информацией между блоками управления. Сеть имеет три основных режима работы – активный при включенном зажигании, спящий при выключенном зажигании и, наконец, режим пробуждения и засыпания, когда зажигание включают и выключают.
CAN-шина выполняет ряд задач, среди которых ускорение передачи сигналов к разным системам, механизмам и устройствам, уменьшение количества проводов, упрощение подсоединения и работы дополнительных устройств.
Виды CAN-шин
Существует три основных вида.
Силовые обеспечивают синхронизацию и обмен данными между ЭБУ двигателя и основными агрегатами и системами автомобиля – коробкой передач, зажиганием и другими. «Комфортные» нужны, соответственно, для работы опций комфорта. Например, климатической системы, электропривода зеркал и обогрева сидений.
Информационно-командные введены для обмена данными между ЭБУ и такими вспомогательными информационными комплексами как навигационная система.
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Рис. 3. Блок-схема межсетевого интерфейса
Схемы CAN-шины
Такая схема подключения устройств называется параллельной схемой подключения. Для достижения максимальной скорости волновые сопротивления блоков должны согласовываться. Если выходит из строя один из блоков (трансмиттеров), этот блок может «завалить» всю шину.
Все сообщения, которые передаются по шине, имеют определенный цифровой код.
Это позволяет производить компьютерную диагностику при помощи опроса блоков по шине.
Диагностическое устройство преобразует цифровые коды и сигнал в абсолютные значения либо коды ошибок.
В спящем режиме CAN-шина полностью не бездействует. Большинство автомобилей используют шину для организации сбора информации дла системы сигнализации и охраны, собирая информацию по шине о датчиках проникновения, контактных устройствах.
Видео «Диагностика авто с помощью CAN шины»
Разновидности функций шин
Существуют разные типы представленного устройства.
- КАН-шина агрегата силового. Это быстрый канал, который передает послания со скоростью 500 кбит/с. Его главная задача заключается в коммуникации блоков управления, например трансмиссия-двигатель.
- Система «Комфорт» — более медлительный канал, передающий данные со скоростью 100 кбит/с. Он связывает все устройства системы «Комфорт».
- Информационно-командная программа шины также передает сигналы медленно (100 кбит/с). Ее основное предназначение — обеспечить связь между обслуживающими системами, например телефоном и навигацией.
Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
- Data Frame. Такой тип сообщений (фреймов) передает сигналы с определенным идентификатором.
- Error Frame представляет собой сообщение сбоя в процессе обмена. Он предлагает повторить действия сначала.
- Overload Frame. Послание появляется в момент необходимости перезапустить работу контроллера.
- Request Frame Remout Transmission обозначает запрос данных, где именно находится идентификатор.
II — резистор сопротивления;
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Разрешение конфликтов на шине
Когда сигналы, поступающие на шину, приходят на несколько контроллеров, система выбирает, в какой очередности будет обработан каждый. Два или более устройства могут начать работу практически одновременно. Чтобы при этом не возник конфликт, производится мониторинг. CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
Существует градация сообщений по приоритетной и рецессивной градации. Информация, имеющая самое низкое числительное выражение поля арбитража, выиграет при наступлении конфликтного положения на шине. Остальные передатчики постараются отослать свои фреймы позже, если ничего не изменится.
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две цепи или более.
Использование шины CAN: как программно управлять автомобилем
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.

Автор: Ariel Nuñez
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.

Рисунок 1: Как при помощи приложения управлять ключевыми функциями автомобиля?
Недавно я вместе со своими друзьями из компании Voyage работал над реализацией программного управления системой кондиционирования в Ford Fusion. На данный момент Voyage занимается разработкой бюджетных самоуправляемых автомобилей. Конечная цель: чтобы каждый смог вызвать автомобиль к своей входной двери и безопасно путешествовать туда, куда вздумается. В компании Voyage считают крайне важной возможностью предоставление доступа к ключевым функциям автомобиля с заднего кресла, поскольку не за горами тот день, когда работа водителя будет полностью автоматизирована.
Зачем нужна шина CAN
Современные автомобили используют множество систем управления, которые во многих случаях функционируют подобно микро-службам в веб-разработке. Например, подушки безопасности, тормозные системы, регулирование скорости движения (круиз контроль), электроусилитель руля, аудиосистемы, управление окнами и дверями, подстройка стекл, системы зарядки для электрических автомобилей и т. д. Эти системы должны уметь осуществлять коммуникацию и считывать параметры друг друга. В 1983 в компании Bosch началась разработка шины CAN (Controller Area Network; Локальная сеть контролеров) для решения этой сложной задачи.
Можно сказать, что шина CAN представляет собой простую сеть, где каждая система автомобиля может считывать и отсылать команды. Эта шина интегрируется все сложные компоненты элегантным образом, что дает возможность реализовать всеми любимые функции автомобиля, которыми мы пользуемся.

Рисунок 2: Впервые шина CAN стала использоваться в 1988 году в БМВ 8 серии
Самоуправляемые автомобили и шина CAN
Поскольку интерес к разработке самоуправляемых автомобилей серьезно вырос, соответственно, словосочетание «шина CAN» также становится популярным. Почему? Большинство компаний, создающих самоуправляемых автомобилей, не занимаются производством с нуля, а пытаются научиться программно управлять машинами после выхода с конвейера фабрики.
Понимание внутреннего устройства шины CAN, используемой в автомобиле, позволяет инженеру формировать команды при помощи программного обеспечения. Самые нужные команды, как вы можете догадаться, связаны с управлением рулем, ускорением и торможением.
Рисунок 3: Введение в LIDAR (ключевой сенсор самоуправляемого автомобиля)
При помощи сенсоров наподобие LIDAR (light detecting and ranging; оптическая локационная система) машина способна смотреть на мир как суперчеловек. Затем компьютер внутри автомобиля на базе полученной информации принимает решения и посылается команды в шину CAN для управления рулем, ускорение и торможением.
Не каждый автомобиль способен стать самоуправляемым. И по некоторым причинам компания Voyage выбрала модель Ford Fusion (подробнее о причинах можно почитать в этой статье).
Исследование шины CAN в Ford Fusion
Перед началом исследования систем кондиционирования воздуха в Ford Fusion я открыл мою любимую книгу The Car Hacker’s Handbook. Перед погружением в суть вопроса заглянем в Главу 2, где описываются три важные концепции: протоколы шины, шина CAN и CAN-фреймы.
Шина CAN
Шина CAN начала использоваться в американских легковых машинах и небольших грузовиках с 1994 года и с 2008 года в обязательном порядке (в европейских автомобилях с 2001 года). В этой шине предусмотрено два провода: CAN high (CANH) и CAN low (CANL). Шина CAN использует дифференциальный сигналинг, суть которого заключается в том, что при поступлении сигнала на одном проводе вольтаж повышается, а на другом понижается на одну и ту же величину. Дифференциальный сигналинг используется в средах, которые должны быть малочувствительны к шуму, например, в автомобильных системах или при производстве.
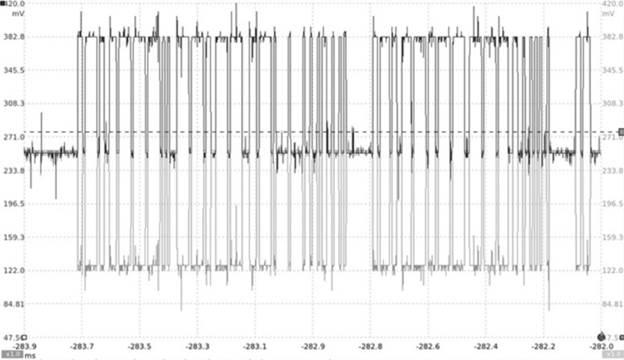
Рисунок 4: Необработанный сигнал шины CAN, отображаемый на осциллографе
С другой стороны, пакеты, передаваемые по шине CAN, не стандартизированы. Каждый пакет содержит 4 ключевых элемента:
- АрбитражныйID (ArbitrationID) представляет собой широковещательно сообщение, идентифицирующее устройство, которое пытается начать коммуникацию. Любое устройство может отсылать несколько арбитражных ID. Если в единицу времени по шине отсылаются два CAN-пакета, пропускается тот, у которого ниже арбитражный ID.
- Расширение идентификатора (Identifierextension;IDE) – в случае с шиной CAN стандартной конфигурации этот бит всегда равен 0.
- Код длины данных (Datalengthcode;DLC) определяет размер данных, который варьируется от 0 до 8 байт.
- Данные. Максимальный размер данных, переносимых стандартной шиной CAN, может быть до 8 байт. В некоторых системах происходит принудительное дополнение пакета до размера 8 байт.
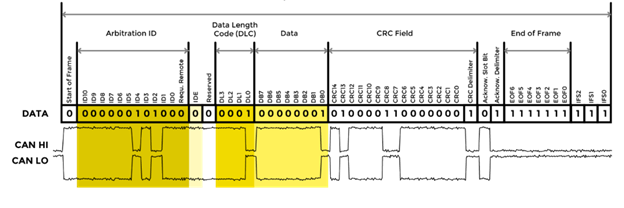
Рисунок 5: Формат стандартных CAN-пакетов
CAN фреймы
Для того чтобы включить / выключить климатическую систему мы должны найти нужную шину CAN (в автомобиле таких шин несколько). В Ford Fusion есть как минимум 4 задокументированные шины. 3 шины работают на высокой скорости 500 кбит/с (High Speed CAN; HS) и 1 шина на средней скорости 125 кбит/с (Medium Speed CAN; MS).
К порту OBD-II подключено две высокоскоростные шины HS1 и HS2, однако там стоит защита, которая не позволяет подделывать команды. Вместе с Аланом из компании Voyage мы вынули порт OBD-II и нашли места соединения со всеми шинами (HS1, HS2, HS3 и MS). На задней стенке OBD-II все шины подключались к модулю шлюза (Gateway Module).
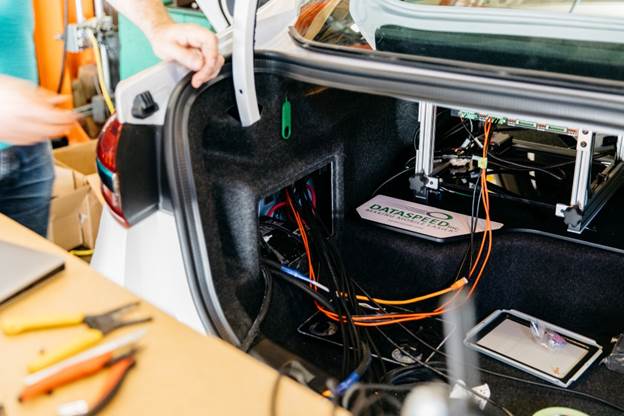
Рисунок 6: Homer – первое самоуправляемое такси от компании Voyage
Поскольку климатическая система управляется через медиа-интерфейс (SYNC), нам придется отсылать команды через среднескоростную шину (MS).
Чтение и запись CAN-пакетов осуществляется при помощи драйвера и сетевого стека SocketCAN, созданного исследовательским отделом компании Volkswagen для ядра в Linux.
Мы будем подсоединять три провода от машины (GND, MSCANH, MSCANL) к переходнику Kvaser Leaf Light HSv2 (можно купить за 300$ на Амазоне) или к CANable (продается за 25$ на Tindie) и загружать на компьютере со свежим Linux-ядром шину CAN в качестве сетевого устройства.
После загрузки запускаем команду candump can0 и начинаем отслеживать трафик:
Несмотря на то, что вышеуказанная информация эквивалентна амплитуде звукового сигнала, довольно трудно понять, что происходит, и обнаружить какие-либо закономерности. Нам нужно нечто похожее на частотный анализатор, и такой эквивалент есть в виде утилиты cansniffer. Cansniffer показывает список идентификаторов и позволяет отслеживать изменения в секции данных внутри CAN-фрейма. По мере того как мы будем изучать определенные идентификаторы, мы можем установить фильтр нужных ID, которые имеют отношение к нашей задаче.
На рисунке ниже показан пример информации, снятой при помощи cansniffer с шины MS. Мы отфильтровали все, что имеет отношение к идентификаторам 355, 356 и 358. После нажатия и отпускания кнопок, связанных с подстройкой температуры, в самом конце появляется значение 001C00000000.
Рисунок 7: Информация с шины MS, снятая при помощи утилиты cansniffer
Далее необходимо объединить функционал для управления климатической системой с компьютером, работающим внутри автомобиля. Компьютер работает на операционной системе ROS (Robot Operating System; Операционная система для роботов). Поскольку мы используем SocketCAN, то модуль socketcan_bridge серьезно упрощает задачу по преобразованию CAN-фрейма в блок информации, понимаемый операционной системой ROS.
Ниже показан пример алгоритма декодирования:
Полученные данные хранятся в CelsiusReport.msg:
После нажатия всех нужных кнопок в машине, у нас появляется следующий список:
Затем эти строки отсылаются на узел под управлением операционной системы ROS и далее происходит трансляция в коды, понимаемые автомобилем:
Заключение
Теперь мы можем создавать и посылать те же самые коды в шину CAN, которые формируются при нажатии физических кнопок, связанных с повышением и понижением температуры, что дает возможность удаленного изменения температуры автомобиля при помощи приложения, когда мы находимся на заднем сидении автомобиля.
Рисунок 8: Удаленное управление климатической системой автомобиля
Это лишь небольшой шаг при создании самоуправляемого такси вместе со специалистами компании Voyage. Я получил массу положительных эмоций во время работы над этим проектом. Если вы тоже интересуетесь этой темой, можете ознакомиться со списком вакансий в компании Voyage.
Источник