История создания Ethernet-CAN конвертера
Одним ясным солнечным днем по работе понадобился недорогой преобразователь интерфейсов CAN в Ethernet. Естественно поиски начались с готовых решений, но, как нередко это бывает, в итоге было принято решение о разработке собственного образца. Естественно, энтузиазм автора не смог устоять и ограничиться столь «урезанным» функционалом. Что из этого вышло, каким образом и почему — под катом.
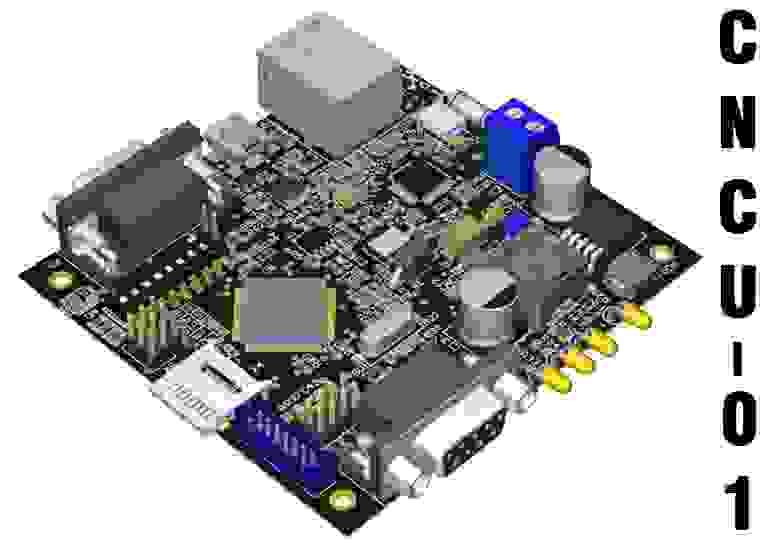
Общая сводка. На фото выше представлена 3D модель разработанной мной платы при помощи САПР Altium Designer. Основные характеристики и функционал:
- 10100 Mb Ethernet
- RTC
- MicroSD (FAT12, FAT16, FAT32) 4GB
- RS232 RS485
- CAN
- Buzzer
- 3 User LED
- GPIO
- EEPROM 32 KB
- FLASH 2 MB
- I2C
- SPI
- UART
- SW JTAG
- USB serial (COM Port)
- Power: miniUSB 5V External 9..24V
Стоимость собранной платы
5000 Р. Проект носит open source характер, исходники можно найти на github. То, что получилось в итоге, помимо основного функционала, можно считать неплохой отладочной платой для работы с микроконтроллером STM32.
А теперь к подробностям создания.
Hardware
Изучение данной задачи началось с поиска и оценки готовых решений. Основными требованиями были:
- преобразование поступающих CAN2.0B фреймов в TCPIP пакеты и наоборот;
- невысокая стоимость, как следствие реализация устройства на базе микроконтроллера.
У коллег из Китая есть несколько промышленных решений, но не из дешевых, поэтому в наш офис на тест был доставлен представитель отечественного производства «Преобразователь интерфейсов ПИРС CAN-Ethernet». По описанным возможностям и характеристикам устройство удовлетворяло скромное Т.З., оставалось лишь проверить работоспособность на деле, чем я и занялся, вооружившись Wireshark’ом и осциллографом. По неизвестной причине при отправке в девайс TCP пакетов на выходе устройства, там, где должны были появляться CAN фреймы, выплёвывались последовательности с физическими уровнями CAN (диф. пара), но логическим протоколом интерфейса UART (со стартовыми и стоповыми битами). Вскрыв корпус, открыв документацию микросхем и прозвонив дорожки платы, я обнаружил, что, действительно, пины RX и TX (UART) микроконтроллера соединены с трансивером CAN и с него выведены на внешний разъем. Таким образом, никакой аппаратной поддержки стандарта CAN2.0B ожидать не приходилось.
Вот, что я увидел на выводе CANL «ПИРС CAN-Ethernet» при отправке двух байт данных [0xF0] и [0x0A] по TCPIP:

Порядок бит перевернут, но с этим можно бороться программно, а вот со стартовыми и стоповыми битами через каждый байт что-то сделать на уровне приложения уже сложнее т.к. они вставляются аппаратно.
А вот как должен был выглядеть «истинный» CAN2.0B фрейм с теми же двумя байтами данных:

Как видно из осциллограммы, помимо байт данных в фрейме присутствует немало служебных бит протокола плюс биты стаффинга, а что самое главное – идут они непрерывно без всяких стартовых и стоповых! (Для тех, кому интересно, под спойлером детальное описание данной посылки).
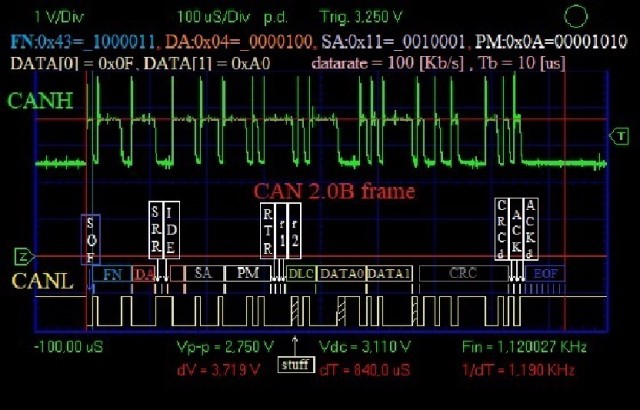
Первые 4 байта – идентификатор фрейма. Подробнее о формате CAN можно узнать из [1]
Таким образом, решить проблему несоответствия CAN и UART фреймов программным способом мне не представлялось возможным и, окинув разочарованным взглядом промежуточные результаты исследований, было принято решение разработки собственного прототипа требуемого устройства.
В связи с тем, что теперь под контроль можно было взять более широкий спектр технических характеристик устройства, добавились следующие требования:
3. Возможность питания от 12-24 В в транспортных системах;
4. Наличие внешней памяти для хранения логов;
5. Размеры платы не более 86х80мм.
6. Рабочий диапазон температур -40..85 °С
В качестве мозга нового устройства была выбрана небезызвестная платформа STM32F407VET6 [2], обладающая аппаратной поддержкой всех необходимых интерфейсов и неплохим запасом RAM и FLASH памяти. Пошерстив интернет, в качестве PHY Ethernet был выбран трансивер DP83848IVV [3], имеющий хорошую, на мой взгляд, документацию и достаточно примеров схем с подключением и трассировкой. В качестве внешней энергонезависимой памяти для хранения логов я выбрал SPI FLASH 2 MB и SPI EEPROM для хранения разнообразных настроек. Кроме того была добавлена защита питания от перенапряжения, переполюсовки. Через N вечеров и M выходных были составлены принципиальная схема и трассировка печатной платы устройства первой версии. Т.к. места на плате было достаточно, а незадействованные ножки МК оставлять не хотелось, помимо основного функционала на плату были добавлены:
- средства для отладки SW, JTAG;
- переключатель 8-DIP Switch;
- micro-USB (USB Serial);
- RS-232;
- UART;
- I2C;
- GPIO
Идея была в том, чтобы при необходимости плата была готова к расширению функционала за счет монтажа дополнительных компонентов. Тем более на стоимость производства запасные посадочные места не влияют. На одной стороне, к сожалению, из-за этого уместить все не удалось, так что плата получилась двусторонняя 86х80мм, мин. ширина дорожки 0.25мм, мин диаметр отверстия 0.6мм.

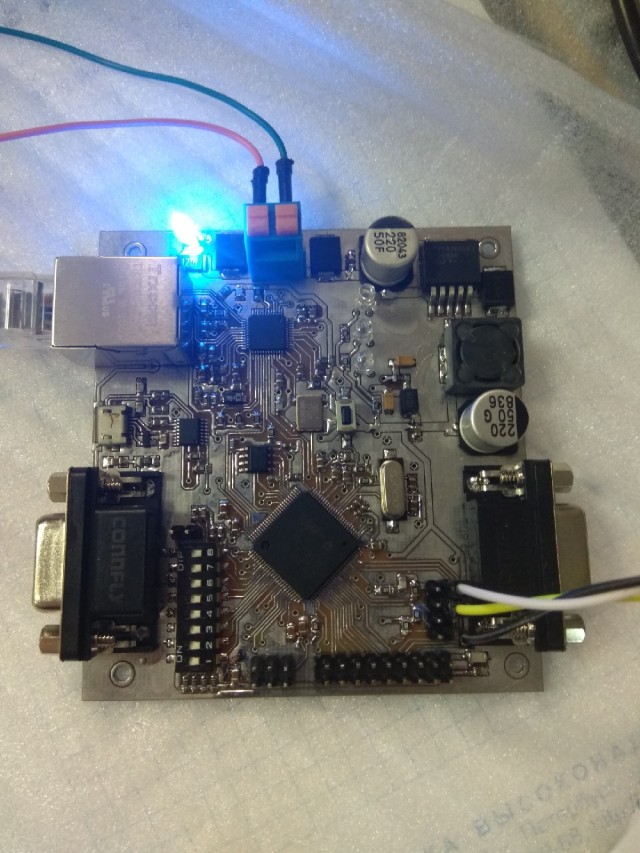
Первая версия PCB-дизайна
Позже были заказаны и собраны два тестовых образца с полным набором периферии для исследований. В целях экономии плата была изготовлена без маски поэтому имеет такой нехарактерный цвет.
При помощи STM32CubeMX я набросал тестовую прошивку с проверкой работоспособности основных периферийный модулей устройства и, в первом приближении, заработало все, кроме запуска МК от внешнего кварца 8 МГц. Оказалось, из-за моей ошибки в составлении спецификации, были напаяны не те нагрузочные конденсаторы. Но это не помешало STM32F407 работать от внутреннего RC-генератора. Когда же я смог пропинговать свое устройство, радости было не сдержать т.к. с трассировкой PHY Ethernet я провозился, наверное, дольше всего. Затем в браузере я увидел свою тестовую http страницу и с тестированием успокоился.
Производство первых образцов плат заказывали в Зеленограде. И, несмотря на то, что стоимость «с» маской и «без» отличалась почти в два раза, не рекомендую так делать даже на стадии прототипа, потому что, как правило, как раз на этом этапе всплывают ошибки трассировки и приходится что-нибудь перепаивать. А паяться на «голых» дорожках крайне неприятно, денег сэкономите, а вот нервов – вряд ли. Да и гадать потом коротнулось ли где-то или трассировка неверная – такое себе удовольствие. Я, в силу неопытности, перепаивая кварцевый резонатор и нагрузочные конденсаторы, один образец таки убил.
К тому времени, на работе, в закромах нашлась железка способная решить поставленную задачу конвертации в текущем проекте, но, помимо крупных габаритов и стоимости, сев писать для нее прошивку, я столкнулся с проблемами связанными с объемом RAM и урезанным функционалом TCPIP стека МК LPC2368. Так что желание сделать свое устройство только усиливалось.
Внимательно изучив недостатки первой версии, я, долго не думая, приступил ко второй. И снова захотелось добавить «задел на будущее», вместив в прежний форм-фактор следующие компоненты:
- поддержка RTC с батарейкой;
- RS-485;
- micro-SD;
- пищалка buzzer;
- возможность питания от USB;
- SPI на внешний разъем;
- питание 5V и 3.3V на внешний разъем.
Кроме прочего была добавлена защита питания по току и TVS диоды на пользовательские разъемы.
В итоге получился этакий dev-board с возможностью подключения внешних модулей. На этот раз плату заказал в Китае. Сборка производилась у нас.
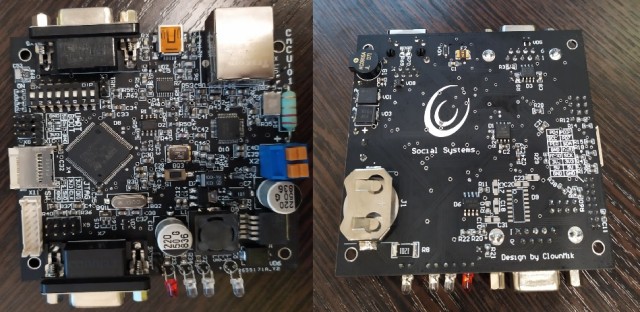
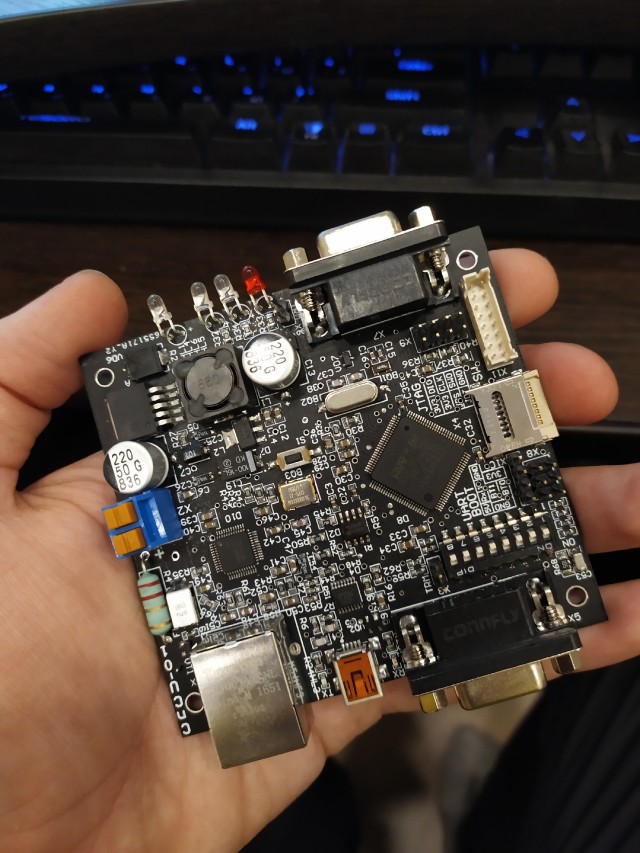
Вторая версия платы
Ко второй версии я разобрался с 3D моделированием в Altium Designer, что очень помогло в избежании ошибок взаимного расположения компонентов по двум сторонам (оказалось, в интернете уже полно готовых моделек SMD компонентов [4]). Тем самым, все ошибки первой версии были исправлены, нововведения показали свою работоспособность, что очень меня порадовало.
Firmware
Описание кода выходит за рамки данной части, однако пару слов о программной составляющей сказать хочется. В своем устройстве я решил использовать связку FreeRTOS + LwIP стек. Статей про них в достаточном количестве, например, [5] и [6], поэтому прикрутить их к своему проекту не должно составить трудностей. Вкратце, LwIP – TCPIP стек для встраиваемых систем, характеризующийся малым потреблением RAM и удобным API (есть даже BCD socket оболочка). Я использовал netconn API. Средствами FreeRTOS, вся работа TCPIP стека помещается в поток отдельный от приложения. Помимо основной работы (соединение внешнего TCP-сервера с CAN шиной) в самостоятельном потоке крутится отдельный веб-сервер для доступа к настройкам устройства. Такой веб-интерфейс предназначен для мониторинга и конфигурации настроек устройства – установки разных режимов работы, скоростей передачи, адресов и т.д. Пока не знаю получится ли сделать и обновление прошивки через него.
Заключение
Это был мой первый (и надеюсь, что не последний) хардверный проект такой сложности и, несмотря на допущенные ошибки, вторую версию платы, думаю, можно считать успешной. На каждой итерации было множество сомнений, но, тем не менее, лишний раз убеждаюсь, что если не пробовать — получаться ничего точно не будет.
Хакаем CAN шину авто. Виртуальная панель приборов

В первой статье «Хакаем CAN шину авто для голосового управления» я подключался непосредственно к CAN шине Comfort в двери своего авто и исследовал пролетающий траффик, это позволило определить команды управления стеклоподъемниками, центральным замком и др.
В этой статье я расскажу как собрать свою уникальную виртуальную или цифровую панель приборов и получить данные с любых датчиков в автомобилях группы VAG (Volkswagen, Audi, Seat, Skoda).
Мною был собран новый CAN сниффер и CAN шилд для Raspberry Pi на базе модуля MCP2515 TJA1050 Niren, полученные с их помощью данные я применил в разработке цифровой панели приборов с использованием 7″ дисплея для Raspberry Pi. Помимо простого отображения информации цифровая панель реагирует на кнопки подрулевого переключателя и другие события в машине.
В качестве фреймворка для рисования приборов отлично подошел Kivy для Python. Работает без Иксов и для вывода графики использует GL.
- CAN сниффер из Arduino Uno
- Подслушиваем запросы с помощью диагностической системы VAG-COM (VCDS)
- Разработка панели приборов на основе Raspberry Pi и 7″ дисплея
- Софт панели приборов на Python и Kivy (UI framework)
- Видео работы цифровой панели приборов на базе Raspberry Pi
Под катом полная реализация проекта, будет интересно!

Водительская дверь открыта
CAN сниффер из Arduino Uno
Чтобы послушать, что отправляет VCDS в CAN шину я собрал сниффер на макетке из Arduino и модуля MCP2515 TJA1050 Niren.
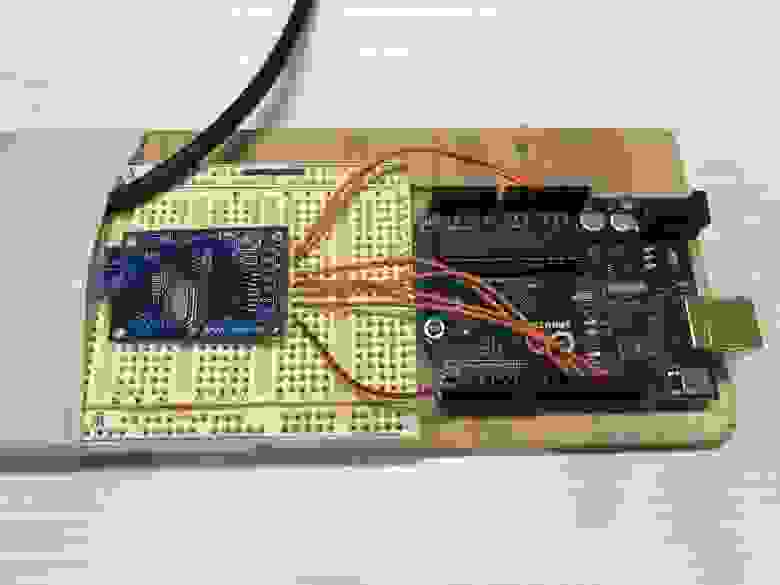
Схема подключения следующая:

Для прослушивания трафика использовал анализатор CanHackerV2 и прошивку arduino-canhacker для Arduino, которая реализует API совместимое с этой программой. Прошивка в гите https://github.com/autowp/arduino-canhacker.
CanHackerV2 позволяет смотреть пролетающий трафик, записывать и проигрывать команды с заданным интервалом, что очень сильно помогает в анализе данных.
Подслушиваем запросы с помощью диагностической системы VAG-COM (VCDS)
Описание VCDS с официального сайта ru.ross-tech.com:
Программно-аппаратный сканер VCDS предназначен для диагностики электронных систем управления, устанавливаемых на автомобилях группы VAG. Доступ ко всем системам: двигатель, ACP, АБС, климат-контроль, кузовая электроника и т.п., считывание и стирание кодов неисправностей, вывод текущих параметров, активация, базовые установки, адаптация, кодирование и т.п.
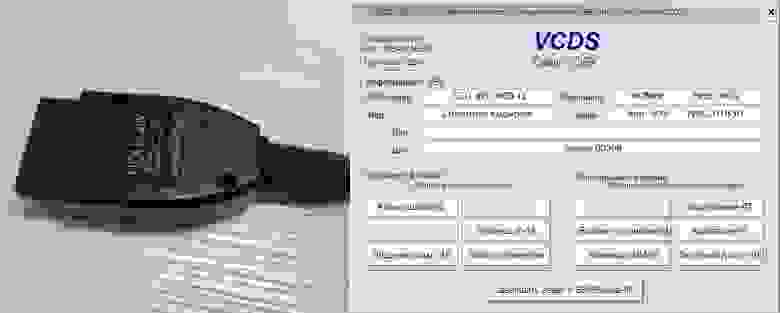
Подключив сниффер к линиям CAN_L и CAN_H в диагностическом шнурке я смог увидеть какие запросы делает VCDS и что отвечает авто.
Особенность авто группы VAG в том, что OBD2 разъем подключен к CAN шине через шлюз и шлюз не пропускает весь гуляющий по сети трафик, т.е. подключившись в OBD2 разъем сниффером вы ничего не увидите. Чтобы получить данные в OBD2 разъёме нужно отправлять шлюзу специальные запросы. Эти запросы и ответы видно при прослушивании трафика от VCDS. Например вот так можно получить пробег.
В VCDS можно получить информацию почти с любого датчика в машине. Меня в первую очередь интересовала информация, которой вообще нет на моей приборке, это:
- температура масла
- какая именно дверь открыта
Скорость, обороты, температура ОЖ, пробег, расход, место в баке и другие запросы я тоже получил, для справки размещу.
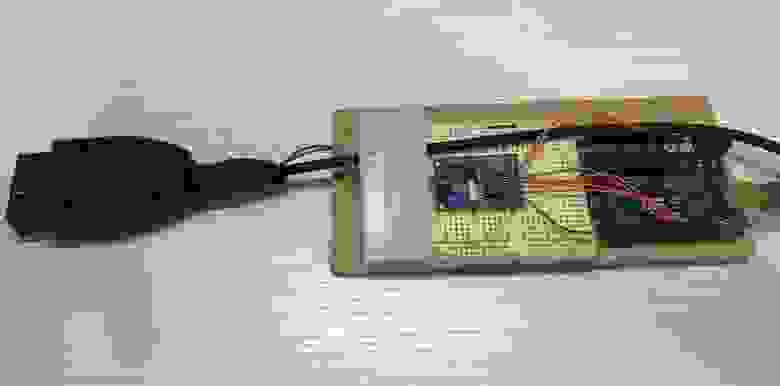
Разработка панели приборов на основе Raspberry Pi и 7″ дисплея
В качестве аппаратной части я выбрал Raspberry Pi. Была идея использовать Android планшет, но показалось, что на Raspberry Pi будет проще и быстрее. В итоге докупил официальный 7″ дисплей, и сделал CAN шилд из модуля TJA1050 Niren.

OBD2 штекер использовал от старого ELM327 адаптера.

Используются контакты: CAN_L, CAN_H, +12, GND.
Тесты в машине прошли успешно и теперь нужно было все собрать. Плату дисплея, Raspberry Pi и блок питания разместил на куске черного пластика, очень удачно подобрал пластмассовые втулки, с ними ничего не болтается и надежно закреплено.

Местом установки выбрал бардачок на торпедо, которым я не пользуюсь. По примеркам в него как раз помещается весь бутерброд.

Напильником довел лист черного пластика до размера крышки бардачка, к нему прикрепил бутерброд и дисплей. Для прототипа сойдет, а 3D модель с крышкой для дисплея и всеми нужными крепежами уже в разработке.

Софт панели приборов на Python и Kivy (UI framework)
Параллельно со сборкой самой панели приборов я вел разработку приложения для отображения информации с датчиков. В самом начале я не планировал какой либо дизайн.
Первая версия панели приборов
По мере разработки решил визуализировать данные более наглядно. Хотел гоночный дизайн, а получилось, что-то в стиле 80-х.
Вторая версия панели приборов
Продолжив поиски более современного дизайна я обратил внимание какие цифровые приборки делают автопроизводители и постарался сделать что-то похожее.
Третья версия панели приборов
Ранее, я никогда не разрабатывал графические приложения под Linux поэтому не знал с чего начать. Вариант на вебе простой в разработке, но слишком много лишних компонентов: иксы, браузер, nodejs, хотелось быстрой загрузки. Попробовав Qt PySide2 я понял, что это займет у меня много времени, т.к. мало опыта. Остановился на Kivy — графический фреймворк для Python, простой в понимании с полной библиотекой графических элементов и дающий возможность быстро создать мобильный интерфейс.
Kivy позволяет запускать приложение без Иксов, прямо из консоли, в качестве рендера используется OpenGL. Благодаря этому полная загрузка системы может происходить за 10 секунд.
Алгоритм работы следующий, используется 3 потока:
- В главном потоке работаем с графическими элементы (спидометр, тахометр, часы, температуры и др) на экране
- Во втором потоке каждые 5 мс делаем опрос следующего датчика
- В третьем потоке слушаем CAN шину, получив ответ парсим его и обновляем соответствующий графический элемент
Работает стабильно, самый долгий процесс в разработке был связан с рисованием дизайна. На данный момент обкатываю решение и потихоньку пишу мобильное приложение для iOS, чтобы любой мог попробовать цифровую панель приборов.
Проект цифровой панель приборов открытый. Рад буду предложениям и комментариям!
Видео работы цифровой панели приборов на базе Raspberry Pi
Приложение на телефон Виртуальная панель приборов
Для телефона написал приложение — виртуальная панель приборов, данные от машины передаются через ELM327 Wi-Fi адаптер. Адаптер подключается в OBD2 разъем, делает запросы по CAN шине и возвращается ответы в приложение по Wi-Fi.
Приложение VAG Virtual Cockpit уже в AppStore. Пока, что только под iPhone/iPad, но Android версия планируется. Приложение решил сделать платным с минимальной символической стоимостью.
Если есть желание поддержать проект, то вот ссылка на приложение, принимаю любые замечания и предложения!
VAG Virtual Cockpit
Источник